-

AMR
AMR trolley, ມັນເປັນຍານພາຫະນະການຂົນສົ່ງທີ່ຕິດຕັ້ງອຸປະກອນການຊີ້ນໍາອັດຕະໂນມັດເຊັ່ນ: ໄຟຟ້າຫຼື optical, ທີ່ສາມາດເດີນທາງຕາມເສັ້ນທາງແນະນໍາ, ມີການປ້ອງກັນຄວາມປອດໄພແລະຫນ້າທີ່ການໂອນຕ່າງໆ. ໃນຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາ, ມັນເປັນຍານພາຫະນະການຂົນສົ່ງທີ່ບໍ່ຮຽກຮ້ອງໃຫ້ມີຄົນຂັບ. ແຫຼ່ງພະລັງງານຂອງມັນແມ່ນຫມໍ້ໄຟທີ່ສາມາດສາກໄຟໄດ້.
Submerged AMR: ເຂົ້າໄປໃນທາງລຸ່ມຂອງລົດບັນທຸກວັດສະດຸ, ແລະອັດຕະໂນມັດ mount ແລະແຍກຕ່າງຫາກເພື່ອຮັບຮູ້ການປະຕິບັດການຈັດສົ່ງວັດສະດຸແລະການລີໄຊເຄີນ. ໂດຍອີງໃສ່ເຕັກນິກການວາງຕໍາແຫນ່ງແລະການນໍາທາງຕ່າງໆ, ຍານພາຫະນະຂົນສົ່ງອັດຕະໂນມັດທີ່ບໍ່ຈໍາເປັນຕ້ອງຂັບລົດຂອງມະນຸດແມ່ນເອີ້ນວ່າ AMR.
-

ພາເລດເຊີ
palletizer ແມ່ນຜະລິດຕະພັນຂອງການປະສົມປະສານທາງອິນຊີຂອງເຄື່ອງຈັກແລະໂຄງການຄອມພິວເຕີ, ມັນປັບປຸງປະສິດທິພາບຂອງການຜະລິດທີ່ທັນສະໄຫມ. ເຄື່ອງ Palletizing ໄດ້ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸດສາຫະກໍາ palletizing. ຫຸ່ນຍົນ Palletizing ສາມາດປະຫຍັດຄ່າແຮງງານແລະພື້ນທີ່ຊັ້ນໄດ້ຢ່າງຫຼວງຫຼາຍ.
ຫຸ່ນຍົນ palletizing ມີຄວາມຍືດຫຍຸ່ນ, ຊັດເຈນ, ໄວ, ປະສິດທິພາບ, ຄວາມຫມັ້ນຄົງແລະປະສິດທິພາບ.
ລະບົບຫຸ່ນຍົນ palletizing ໃຊ້ອຸປະກອນຫຸ່ນຍົນປະສານງານ, ເຊິ່ງມີຄວາມໄດ້ປຽບຂອງຮອຍຕີນຂະຫນາດນ້ອຍແລະປະລິມານຂະຫນາດນ້ອຍ. ແນວຄວາມຄິດຂອງການສ້າງເສັ້ນປະກອບເຄື່ອງຈັກ block ອັດຕະໂນມັດທີ່ມີປະສິດທິພາບ, ປະສິດທິພາບແລະປະຫຍັດພະລັງງານຢ່າງເຕັມທີ່ສາມາດຖືກຮັບຮູ້.
-

ເຄື່ອງພັບຖາດ
ເຄື່ອງພັບຖາດແມ່ນອຸປະກອນອັດຕະໂນມັດ, ເຊິ່ງເອີ້ນວ່າເຄື່ອງຖາດລະຫັດ, ມັນຖືກນໍາໃຊ້ໃນລະບົບລໍາລຽງຖາດ, ປະສົມປະສານກັບລໍາລຽງຕ່າງໆ, ເພື່ອແຈກຢາຍຖາດເປົ່າໃຫ້ກັບສາຍລໍາລຽງ. ເຄື່ອງພັບ tray ຖືກນໍາໃຊ້ເພື່ອ stack pallets ດຽວເຂົ້າໄປໃນ stacking pallets, ລວມທັງ: ໂຄງສ້າງສະຫນັບສະຫນູນ pallet stacking, ຕາຕະລາງຍົກ pallet, ເຊັນເຊີການໂຫຼດ, ການກວດສອບຕໍາແຫນ່ງ pallet, ເປີດ / ປິດ sensor ຫຸ່ນຍົນ, ຍົກ, ຕ່ໍາ, ສະຫຼັບຕໍາແຫນ່ງກາງ.
-

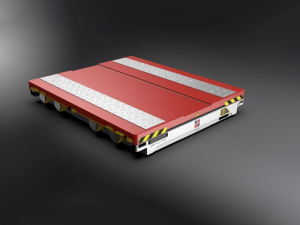
RGV
RGV ຫຍໍ້ມາຈາກ Rail Guide Vehicle, ຍັງເອີ້ນວ່າ trolley. RGV ຖືກນໍາໃຊ້ໃນສາງທີ່ມີວິທີການເກັບຮັກສາຄວາມຫນາແຫນ້ນສູງຕ່າງໆ, ແລະ aisles ສາມາດອອກແບບຕາມຄວາມຍາວໃດໆເພື່ອເພີ່ມຄວາມສາມາດໃນການເກັບຮັກສາຂອງສາງທັງຫມົດ. ນອກຈາກນັ້ນ, ໃນເວລາທີ່ເຮັດວຽກ, ທ່ານຍັງສາມາດໃຊ້ປະໂຫຍດຈາກຄວາມຈິງທີ່ວ່າ forklift ບໍ່ຈໍາເປັນຕ້ອງເຂົ້າໄປໃນທາງເລນ, ສົມທົບກັບການເຄື່ອນໄຫວຢ່າງໄວວາຂອງ trolley ໃນເສັ້ນທາງລ້ານຊ້າງ, ມັນສາມາດປັບປຸງປະສິດທິພາບການດໍາເນີນງານຂອງສາງແລະເຮັດໃຫ້ມັນມີຄວາມປອດໄພຫຼາຍຂຶ້ນ.
-

ລະບົບ shuttle 4D ປະເພດມາດຕະຖານ
ໃນຖານະທີ່ເປັນອຸປະກອນຫຼັກຂອງສາງທີ່ເຂັ້ມຂຸ້ນອັດສະລິຍະລົດສີ່ທາງ, ລົດຕັ້ງແລະແນວນອນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍການປະກອບ rack, ລະບົບໄຟຟ້າ, ລະບົບການສະຫນອງພະລັງງານ, ລະບົບຂັບ, ລະບົບ jacking, ລະບົບເຊັນເຊີ, ແລະອື່ນໆ.
-

ລະບົບ shuttle 4D ສໍາລັບອຸນຫະພູມຕ່ໍາ
ໂຄງສ້າງຂອງແຖບທີ່ມີອຸນຫະພູມຕ່ໍາຂອງ crossbar ແມ່ນພື້ນຖານຄືກັນກັບສະບັບມາດຕະຖານ. ຄວາມແຕກຕ່າງຕົ້ນຕໍແມ່ນຢູ່ໃນສະພາບແວດລ້ອມການດໍາເນີນງານທີ່ແຕກຕ່າງກັນ. ສະບັບພາສາອຸນຫະພູມຕ່ໍາຂອງ crossbar ສ່ວນໃຫຍ່ແມ່ນໃຊ້ໃນສະພາບແວດລ້ອມຂອງ - 30 ℃, ສະນັ້ນການເລືອກວັດສະດຸພາຍໃນຂອງມັນແມ່ນແຕກຕ່າງກັນຫຼາຍ. ອົງປະກອບພາຍໃນທັງຫມົດມີຄວາມທົນທານຕໍ່ອຸນຫະພູມຕ່ໍາ, ຫມໍ້ໄຟຍັງເປັນຫມໍ້ໄຟທີ່ມີປະສິດທິພາບສູງທີ່ມີອຸນຫະພູມຕ່ໍາ, ເຊິ່ງສາມາດສະຫນັບສະຫນູນການສາກໄຟໃນສະພາບແວດລ້ອມ -30 ° C. ນອກຈາກນັ້ນ, ລະບົບການຄວບຄຸມພາຍໃນຍັງໄດ້ຮັບການຜະນຶກເຂົ້າກັນເພື່ອປ້ອງກັນບໍ່ໃຫ້ນ້ໍາຂົ້ນໃນເວລາທີ່ການບໍາລຸງຮັກສາອອກຈາກສາງ.
-

ລະບົບ shuttle 4D ສໍາລັບຄໍາຮ້ອງສະຫມັກຄວາມໄວສູງ
ກົນໄກຂອງຮຸ່ນຄວາມໄວສູງຂອງລົດຕັ້ງແລະແນວນອນແມ່ນພື້ນຖານຄືກັນກັບລົດຕັ້ງແລະແນວນອນທົ່ວໄປ, ຄວາມແຕກຕ່າງຕົ້ນຕໍແມ່ນຢູ່ໃນການປັບປຸງຄວາມໄວໃນການຍ່າງ. ໃນທັດສະນະຂອງສິນຄ້າ pallet ຂ້ອນຂ້າງປົກກະຕິແລະຫມັ້ນຄົງ, ເພື່ອປັບປຸງປະສິດທິພາບໂດຍລວມຂອງໂຄງການແລະຫຼຸດຜ່ອນຈໍານວນຂອງ crossbars ນໍາໃຊ້, ສະບັບພາສາຄວາມໄວສູງຂອງ crossbars ແມ່ນສະເຫນີ. ດັດຊະນີຄວາມໄວໃນການຍ່າງແມ່ນສອງເທົ່າຂອງຮຸ່ນມາດຕະຖານ, ແລະຄວາມໄວຂອງ jacking ຍັງບໍ່ປ່ຽນແປງ. ເພື່ອປັບປຸງຄວາມປອດໄພ, laser ຄວາມປອດໄພໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນອຸປະກອນເພື່ອປ້ອງກັນອັນຕະລາຍຈາກການດໍາເນີນງານຄວາມໄວສູງ.
-
ລະບົບລົດຮັບສົ່ງ 4D ສໍາລັບຄໍາຮ້ອງສະຫມັກການໂຫຼດຫນັກ
ກົນໄກຂອງ crossbar ຫນັກແມ່ນພື້ນຖານຄືກັນກັບສະບັບມາດຕະຖານ, ຄວາມແຕກຕ່າງຕົ້ນຕໍແມ່ນວ່າຄວາມສາມາດໃນການໂຫຼດຂອງມັນແມ່ນການປັບປຸງຢ່າງຫຼວງຫຼາຍ. ຄວາມສາມາດໃນການບັນທຸກຂອງມັນຈະບັນລຸເກືອບສອງເທົ່າຂອງຮຸ່ນມາດຕະຖານ, ແລະຕາມລໍາດັບ, ຄວາມໄວແລ່ນທີ່ສອດຄ້ອງກັນຂອງມັນຈະຫຼຸດລົງເຊັ່ນກັນ. ທັງຄວາມໄວໃນການຍ່າງ ແລະ jacking ຈະຫຼຸດລົງ.
-

Dense Racking ສໍາລັບ shuttles 4D
ຊັ້ນວາງຂອງຄັງສິນຄ້າແບບສຸມສີ່ທາງສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍຊິ້ນສ່ວນ rack, sub-channel crossbeams, ຕິດຕາມຊ່ອງຍ່ອຍ, ອຸປະກອນເຊືອກຜູກຕາມລວງນອນ, ຊ່ອງທາງຫລັກ crossbeams, ຊ່ອງທາງຫລັກ, ການເຊື່ອມຕໍ່ຂອງ racks ແລະພື້ນດິນ, ຕີນທີ່ສາມາດປັບໄດ້, ດຶງກັບຄືນໄປບ່ອນ, ຕາຫນ່າງປ້ອງກັນ, ladders ບໍາລຸງຮັກສາ, ວັດສະດຸຕົ້ນຕໍຂອງ shelf ແມ່ນ Q35 ແລະ W255 ວັດຖຸດິບ. ທາດເຫຼັກແລະເຫລໍກຖືກເລືອກແລະຖືກສ້າງຕັ້ງຂຶ້ນໂດຍການມ້ວນເຢັນ.
-

ລະບົບ hoisting ຄວາມໄວສູງ
ລິຟ pallet reciprocating ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍພາກສ່ວນຕົ້ນຕໍເຊັ່ນ: ອຸປະກອນຂັບລົດ, ເວທີຍົກ, ຕັນການດຸ່ນດ່ຽງ counterweight, ກອບນອກ, ແລະຕາຫນ່າງນອກ.
-
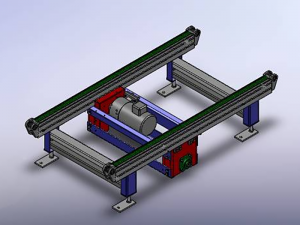
ຂໍ້ມູນລະບົບລໍາລຽງ 4D shuttle
ມໍເຕີຂັບ shaft ຂັບຜ່ານກຸ່ມສາຍສົ່ງ, ແລະ shaft ຂັບຂັບຕ່ອງໂສ້ລໍາລຽງເພື່ອຮັບຮູ້ຫນ້າທີ່ລໍາລຽງຂອງ pallet ໄດ້.
-

WCS-Warehouse Control System
ລະບົບ WCS ຮັບຜິດຊອບໃນການກໍານົດເວລາລະຫວ່າງລະບົບແລະອຸປະກອນ, ແລະສົ່ງຄໍາສັ່ງທີ່ອອກໂດຍລະບົບ WMS ໄປຫາອຸປະກອນແຕ່ລະຄົນເພື່ອປະຕິບັດການປະສານງານ. ມີການສື່ສານຢ່າງຕໍ່ເນື່ອງລະຫວ່າງອຸປະກອນແລະລະບົບ WCS. ເມື່ອອຸປະກອນສໍາເລັດວຽກງານ, ລະບົບ WCS ປະຕິບັດການປະກາດຂໍ້ມູນອັດຕະໂນມັດດ້ວຍລະບົບ WMS.