ລະບົບລົດຮັບສົ່ງ 4D ສໍາລັບຄໍາຮ້ອງສະຫມັກການໂຫຼດຫນັກ
ລາຍລະອຽດ
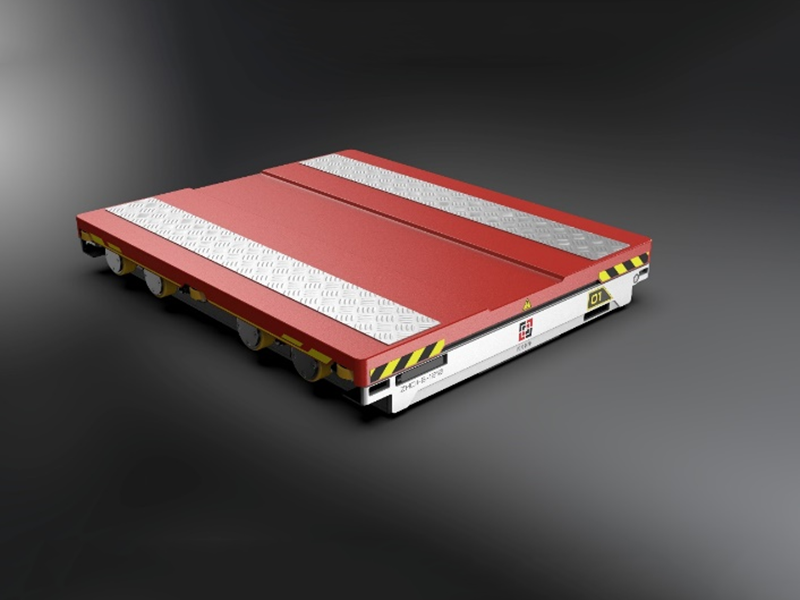
ໃນຖານະເປັນອຸປະກອນຫຼັກຂອງລະບົບການເກັບຮັກສາຄວາມຫນາແຫນ້ນອັດສະລິຍະ, 4D-shuttle ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍການປະສົມກອບ, ລະບົບໄຟຟ້າ, ລະບົບການສະຫນອງພະລັງງານ, ລະບົບຂັບລົດ, ລະບົບຍົກ, ລະບົບເຊັນເຊີ etc.It ມີຫ້າຮູບແບບ: ການຄວບຄຸມໄລຍະໄກ, ຄູ່ມື, ເຄິ່ງອັດຕະໂນມັດ, ອັດຕະໂນມັດທ້ອງຖິ່ນແລະອັດຕະໂນມັດອອນໄລນ໌. ມັນມາພ້ອມກັບການປົກປ້ອງຄວາມປອດໄພຫຼາຍຢ່າງແລະການເຕືອນໄພຄວາມປອດໄພ, ສັນຍານເຕືອນຄວາມປອດໄພໃນພາກພື້ນ, ສັນຍານເຕືອນຄວາມປອດໄພປະຕິບັດງານແລະສັນຍານເຕືອນຄວາມປອດໄພແບບໂຕ້ຕອບ. ທໍ່ແມ່ນເຊື່ອມຕໍ່ໂດຍການເຊື່ອມໂລຫະອາຍແກັສແລະ bolts ທີ່ມີຄວາມເຂັ້ມແຂງສູງ. ການປະສົມປະສານ rack ຮັບຮອງເອົາໂຄງສ້າງສອງຊັ້ນ. ຮູບລັກສະນະທັງຫມົດແມ່ນສີດພົ່ນ, ແລະພາກສ່ວນເຄື່ອງຈັກແລະວົງເລັບໄຟຟ້າແມ່ນ electroplated. ມັນມີສອງຊຸດຂອງລະບົບຂັບລົດແລະສອງຊຸດຂອງລະບົບຍົກ. ລະບົບການຂັບຂີ່ແມ່ນຢູ່ໃນຄວາມຮັບຜິດຊອບຂອງທິດທາງ XY. ຫນຶ່ງໃນລະບົບການຍົກແມ່ນຮັບຜິດຊອບຂອງການຍົກຂອງສິນຄ້າ, ແລະອີກອັນຫນຶ່ງແມ່ນຮັບຜິດຊອບຂອງສະຫຼັບຂອງເສັ້ນທາງປະຖົມແລະມັດທະຍົມ. ທິດທາງ Z ຄວາມສູງສາມາດຮັບຮູ້ການປ່ຽນແປງຊັ້ນຂອງ 4D-shuttle ໂດຍການນໍາໃຊ້ລິຟທີ່ກໍາຫນົດເອງ. ດັ່ງນັ້ນທີ່ຈະຮັບຮູ້ການທໍາງານການເຂົ້າເຖິງຂອງຊ່ອງສາມມິຕິລະດັບ.
ໂຄງສ້າງຂອງປະເພດການໂຫຼດຫນັກແມ່ນພື້ນຖານຄືກັນກັບສະບັບມາດຕະຖານ. ຄວາມແຕກຕ່າງຕົ້ນຕໍແມ່ນວ່າຄວາມສາມາດໃນການໂຫຼດໄດ້ຖືກປັບປຸງຢ່າງຫຼວງຫຼາຍ, ແລະຄວາມສາມາດໃນການບັນທຸກຈະບັນລຸເກືອບສອງເທົ່າຂອງຮຸ່ນມາດຕະຖານ. ການອອກແບບການໂຫຼດຂອງກົນໄກການຍົກແມ່ນເຂັ້ມແຂງ, ແລະພະລັງງານຂອງມໍເຕີ lifitng ເພີ່ມຂຶ້ນເພື່ອຮັບປະກັນວ່າຄວາມສາມາດໃນການຮັບນ້ໍາຫນັກສາມາດບັນລຸ 2.5T. ພະລັງງານຂອງມໍເຕີເດີນທາງຍັງບໍ່ປ່ຽນແປງ. ເພື່ອເພີ່ມຜົນຜະລິດ, ອັດຕາສ່ວນການຫຼຸດຜ່ອນແມ່ນເພີ່ມຂຶ້ນ, ແລະຄວາມໄວແລ່ນຂອງລົດຮັບສົ່ງ 4D ຈະຫຼຸດລົງຕາມລໍາດັບ.
ທຸລະກິດມາດຕະຖານ
ການປະກອບໃບຮັບເງິນແລະການເກັບຮັກສາອອກຈາກສາງ
ການຍ້າຍຊັ້ນ ແລະປ່ຽນຊັ້ນການສາກໄຟສິນຄ້າຄົງຄັງ
ຕົວກໍານົດການດ້ານວິຊາການ
| ໂຄງການ | ຂໍ້ມູນພື້ນຖານ | ຂໍ້ສັງເກດ | |
| ຕົວແບບ | SX-ZHC-T-1210-2T | ||
| ຖາດທີ່ໃຊ້ໄດ້ | ກວ້າງ: 1200mm ຄວາມເລິກ: 1000mm | ||
| ການໂຫຼດສູງສຸດ | ສູງສຸດ 25 00kg | ||
| ຄວາມສູງ/ນ້ຳໜັກ | ຄວາມສູງຂອງຮ່າງກາຍ: 150mm, ນ້ໍາຫນັກລົດຮັບສົ່ງ: 350KG | ||
| ຍ່າງທາງ X ຕົ້ນຕໍ | ຄວາມໄວ | ສູງສຸດບໍ່ໂຫຼດ: 1.5 m/s, ໂຫຼດເຕັມສູງສຸດ: 1 .0m/s | |
| ການເລັ່ງເວລາຍ່າງ | ≤ 1.0m/S2 | ||
| ມໍເຕີ | Brushless Servo Motor 48VDC 1 5 00W | servo ນໍາເຂົ້າ | |
| ເຊີບເວີ Driver | Brushless Servo Driver | servo ນໍາເຂົ້າ | |
| ຍ່າງໄປໃນທິດທາງ Y | ຄວາມໄວ | ສູງສຸດບໍ່ໂຫຼດ: 1.0m / s, ໂຫຼດເຕັມສູງສຸດ: 0.8 m / s | |
| ການເລັ່ງເວລາຍ່າງ | ≤ 0.6m/S2 | ||
| ມໍເຕີ | Brushless Servo Motor 48VDC 15 00W | servo ນໍາເຂົ້າ | |
| ເຊີບເວີ Driver | Brushless Servo Driver | servo ນໍາເຂົ້າ | |
| jacking ສິນຄ້າ | ຄວາມສູງຂອງ Jacking | 30 ມມ _ | |
| ມໍເຕີ | ເຄື່ອງຈັກ Brushless 48VDC 75 0W | servo ນໍາເຂົ້າ | |
| jacking ຕົ້ນຕໍ | ຄວາມສູງຂອງ Jacking | 35 ມມ | |
| ມໍເຕີ | ເຄື່ອງຈັກ Brushless 48VDC 75 0W | servo ນໍາເຂົ້າ | |
| ຊ່ອງທາງຕົ້ນຕໍ / ວິທີການຈັດຕໍາແຫນ່ງ | ການຈັດຕໍາແຫນ່ງເວລາຍ່າງ: ການຈັດຕໍາແຫນ່ງບາໂຄດ / ຕໍາແຫນ່ງເລເຊີ | ເຢຍລະມັນ P+F/SICK | |
| ຊ່ອງທາງທີສອງ / ວິທີການຈັດຕໍາແຫນ່ງ | ການຈັດຕຳແໜ່ງເວລາຍ່າງ: photoelectric + encoder | ເຢຍລະມັນ P+F/SICK | |
| ການຈັດຕໍາແຫນ່ງຖາດ: laser + photoelectric | ເຢຍລະມັນ P+F/SICK | ||
| ລະບົບຄວບຄຸມ | S7-1200 PLC Programmable Controller | ເຢຍລະມັນ SIEMENS | |
| ການຄວບຄຸມໄລຍະໄກ | ຄວາມຖີ່ຂອງການເຮັດວຽກ 433MHZ, ໄລຍະການສື່ສານຢ່າງຫນ້ອຍ 100 ແມັດ | ນຳເຂົ້າແບບກຳນົດເອງ | |
| ການສະຫນອງພະລັງງານ | ຫມໍ້ໄຟ lithium | ຄຸນະພາບສູງພາຍໃນປະເທດ | |
| ຕົວກໍານົດການຫມໍ້ໄຟ | 48V, 30AH, ເວລາໃຊ້≥ 6h, ເວລາສາກໄຟ 3h, ເວລາສາກໄດ້: 1000 ເທື່ອ | ຄວາມອາດສາມາດແຕກຕ່າງກັນຂຶ້ນກັບຂະຫນາດຍານພາຫະນະ | |
| ວິທີການຄວບຄຸມຄວາມໄວ | ການຄວບຄຸມ Servo, ຄວາມໄວຕ່ໍາແຮງບິດຄົງທີ່ | ||
| ວິທີການຄວບຄຸມ crossbar | ການກໍານົດເວລາ WCS, ການຄວບຄຸມຄອມພິວເຕີສໍາຜັດ, ການຄວບຄຸມຫ່າງໄກສອກຫຼີກ | ||
| ລະດັບສຽງລົບກວນປະຕິບັດງານ | ≤60db | ||
| ຄວາມຕ້ອງການສີ | ການປະສົມປະສານ Rack (ສີດໍາ), ຝາເທິງສີແດງ, ອາລູມິນຽມດ້ານຫນ້າແລະຫລັງສີຂາວ | ||
| ອຸນຫະພູມອາກາດລ້ອມຮອບ | ອຸນຫະພູມ: 0℃ ~ 50℃ ຄວາມຊຸ່ມ: 5% ~ 95% (ບໍ່ມີການຂົ້ນ) | ||


